Roboty i ich zastosowania – Robotyka , definicja
Roboty , Napędy SMA do robotów , Serwonapędy , Roboty przemysłowe Robotyka , Wyjaśnienie definicji . Podział robotów , jak działają ….
Robot jest uniwersalnym automatem do wykonywania ruchów, przy czym ruchy wykonywane są w określonych osiach. Charakteryzuje się tym, że jest programowalny, wykonuje dużą liczbę czynności, posiada czujniki, macki i narzędzia.
Robot przemysłowy to automatyczna maszyna, stanowiąca zespół wydajnych mechanizmów i programowalnego układu sterowania, służąca do wykonywania funkcji motorycznych w procesie produkcyjnym.
Obsah článku:
Schemat blokowy robota przemysłowego
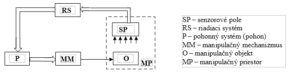
Pole sensoryczne (SP) – czujniki informują o stanie agregatów robota i jego środowisku pracy. Stosowane są systemy indukcyjne, pojemnościowe, optyczne, ultradźwiękowe, rezystancyjne i inne.
Układ sterowania (RS) – zapewnia sterowanie poszczególnymi napędami wykonującymi własny ruch manipulacyjny, a także koordynację z otoczeniem, czyli sceną technologiczną. Scena technologiczna składa się z pracujących maszyn, przenośników taśmowych, urządzeń pozycjonujących lub innych robotów. Układ sterowania składa się z podsystemów pomiarowych, kontrolnych, sterujących, monitorujących i diagnostycznych. Synteza obwodów sterowania zapewnia wymaganą jakość sterowania napędem w stanach statycznych i dynamicznych.
Układ napędowy – napęd (P) – jest zespołem, który składa się z silnika, przewodów, obwodów zapewniających prawidłową pracę silnika, mechanizmu przekładniowego oraz odrębnego organu roboczego. Napęd zapewnia precyzyjne prowadzenie w przestrzeni oraz precyzyjną prędkość i przyspieszenie.
Mechanizm manipulacyjny (MM) – to konstrukcja mechaniczna składająca się z zestawu ramion. Ramiona są niezależnie sterowane i wykonują ruchy przesuwne i obrotowe. Mechanizm manipulacyjny składa się ze stojaka z ramionami, ręki lub nadgarstka, końcówki ramienia z chwytakiem lub głowicy technologicznej.

Włosy przetłuszczające się: 5 domowych sposobów
Chwytak – umożliwia bezpieczne uchwycenie elementu i przeniesienie go z maksymalną prędkością z punktu A do punktu B.
Zgodnie ze sposobem chwytania, macki dzielą się na:
(a) z chwytem pasywnym:
– mechaniczne (elastyczne szczęki i podpórki)
– magnetyczny ( magnesy stałe)
– podciśnienie (przyssawki odkształcające)
(b) z aktywnym chwytem:
– szczęki mechaniczne (z napędem hydraulicznym, pneumatycznym, elektromagnetycznym, elektromotorycznym)
– magnetyczny (elektromagnes)
– podciśnienie lub nadciśnienie (palce elastyczne, komory próżniowe)
Zastosowanie czujników w pojazdach silnikowych z napędem na prąd
Podstawowy podział napędów dla robotów
Napędy do robotów dzielą się na:
(a) siłowniki elektrohydrauliczne
(b) siłowniki elektropneumatyczne
(c) napędy elektryczne
– napędy bezszczotkowe
– napędy
Serwonapędy – reprezentują najwyższy poziom sterowania systemem ruchu. Zadaniem siłownika jest wprowadzenie napędzanego mechanizmu roboczego w określony sposób w stan ruchu tak, aby mechanizm roboczy wykonał wymaganą operację technologiczną lub zapewnił proces technologiczny o wymaganej jakości.
Serwonapęd składa się z :
– system sterowania
– falownik elektryczny
– konwerter mechaniczny
– zasilacz
– maszyna robocza
– silniki
Serwonapędy mogą być wyposażone w:
– silniki asynchroniczne
– silniki synchroniczne
– silniki krokowe
Napędy SMA dla robotów
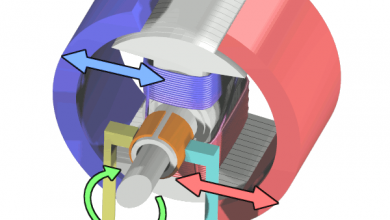
Stopy z pamięcią kształtu (SMA) mają zdolność „zapamiętywania” pewnych, nawet skomplikowanych kształtów i naprzemiennego przyjmowania tych kształtów podczas ogrzewania lub chłodzenia (na podstawie zmiany temperatury), wykonując w ten sposób pracę mechaniczną, ale tylko w jednym kierunku jednocześnie. Wykorzystuje się tzw. jednokierunkowy i dwukierunkowy efekt pamięciowy związków międzymetalicznych takich jak NiTi (nikiel-tytan), CuZnAl (miedź-cynk-aluminium), CuAlNi (miedź-aluminium-nikiel) i innych. SMA jest stosowany w siłownikach robotów, gdzie pozycja może być określona przez kontrolę temperatury.
Ruchy mogą być sterowane przez ogrzewanie elektryczne. SMA znajduje zastosowanie w dziedzinie mikrorobotów, mikromanipulatorów, macek, sztucznych palców i innych. Konstrukcja siłowników SMA jest bardzo zróżnicowana. Do podstawowych rodzajów należą: drut, pręt, taśma, sprężyna i kształt ogólny. Zastosowanie przewodu SMA w funkcji napędu pokazane jest na poniższych rysunkach.
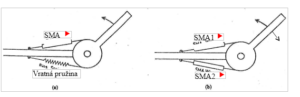
Pierwszy dysk pokazany Rys. (a) wykorzystuje sprężynę powrotną lub inny elastyczny materiał. Poprzez podgrzanie drutu SMA, ramię jest wprawiane w ruch i powraca do swojej pierwotnej pozycji przez sprężynę powrotną. W drugim przypadku Rys. b) są dwa przewody SMA1 i SMA2, w zależności od nagrzania SMA1 i SMA2 ramię przesuwa się w prawo lub w lewo.
W zakresie projektowania siłownika SMA dla robota krytyczne są następujące cechy: wielkość i powtarzalność odkształcenia powrotnego (wydłużenia), zakres temperaturowy zjawiska SMA, wielkość siły, dopuszczalne obciążenie, osiągalna liczba cykli pracy (powyżej 10 000), wielkość odpowiedzi czasowej oraz sposób chłodzenia.
Ogólnie rzecz biorąc, siłowniki SMA mogą wywierać dużą siłę na stosunkowo małej drodze. Możliwość adaptacji kształtu pozwala na projektowanie napędów dostosowanych do potrzeb klienta, które bez przekładni mechanicznych mają doskonały stosunek mocy do masy. Są one bardzo niezawodne i odporne na trudne warunki pracy. Doskonale sprawdzają się w obszarze do 100 g i są proste w konstrukcji.